SolveFactory is a factory class for solving a set of linear equations to generate a polynomial based on nearby points. More...
#include <SolveFactory.h>
Public Member Functions | |
| SolveFactory (int smoothing_order, int point_dim, int value_dim, std::vector< std::vector< double > > positions, std::vector< std::vector< double > > deriv_positions, std::vector< std::vector< int > > &deriv_indices) | |
| ~SolveFactory () | |
| SquarePolynomialVector * | PolynomialSolve (const std::vector< std::vector< double > > &values, const std::vector< std::vector< double > > &deriv_values) |
| std::vector< double > | MakeSquareVector (std::vector< double > position) |
| std::vector< double > | MakeSquareDerivVector (std::vector< double > position, std::vector< int > derivIndices) |
Private Member Functions | |
| void | BuildHInvMatrix (std::vector< std::vector< double > > positions, std::vector< std::vector< double > > deriv_positions, std::vector< std::vector< int > > &deriv_indices) |
Private Attributes | |
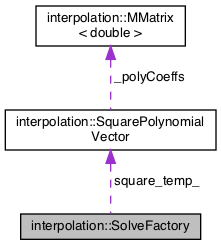
| int | n_poly_coeffs_ |
| std::vector< std::vector< int > > | square_points_ |
| std::vector< std::vector< int > > | square_deriv_nearby_points_ |
| SquarePolynomialVector | square_temp_ |
| MMatrix< double > | h_inv_ |
Detailed Description
SolveFactory is a factory class for solving a set of linear equations to generate a polynomial based on nearby points.
See also PPSolveFactory for more details
Definition at line 44 of file SolveFactory.h.
Constructor & Destructor Documentation
◆ SolveFactory()
| interpolation::SolveFactory::SolveFactory | ( | int | smoothing_order, |
| int | point_dim, | ||
| int | value_dim, | ||
| std::vector< std::vector< double > > | positions, | ||
| std::vector< std::vector< double > > | deriv_positions, | ||
| std::vector< std::vector< int > > & | deriv_indices | ||
| ) |
Construct a new SolveFactory.
- Parameters
-
polynomial_order Order of the polynomial part of the fit smoothing_order Order of the smoothing part of the fit; should always be >= polynomial_order point_dim Dimension of the points (i.e. space of x), for y = f(x) value_dim Dimension of the values (i.e. space of y), for y = f(x) positions Position of the values; should be a vector of length polynomial_order^point_dim. Each element should be a vector of length point_dim deriv_positions Position of the derivatives; should be a vector of length smoothing_order^point_dim - polynomial_order^point_dim. Each element should be a vector of length point_dim. deriv_indices Index the derivatives. Should be a vector with same length as deriv_positions. Each element should be a vector of length point_dim. Each element tells us what derivative will be defined, indexing by the order of the derivative.
The constructor takes the set of positions; then performs a matrix inversion. Each call to PolynomialSolve uses the same matrix inversion in solution of the linear equations (hence when we do this lots of times as in PolynomialPatch, we get a lot faster). The matrix inversion can fail for badly formed sets of positions/deriv_positions; caveat emptor!
Definition at line 39 of file SolveFactory.cpp.
References BuildHInvMatrix(), interpolation::PPSolveFactory::getNearbyPointsSquares(), n_poly_coeffs_, interpolation::SquarePolynomialVector::NumberOfPolynomialCoefficients(), square_points_, and square_temp_.

◆ ~SolveFactory()
|
inline |
Destructor; does nothing
Definition at line 82 of file SolveFactory.h.
Member Function Documentation
◆ BuildHInvMatrix()
|
private |
Definition at line 61 of file SolveFactory.cpp.
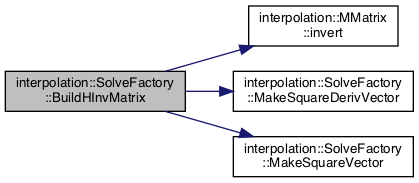
References h_inv_, interpolation::MMatrix< Tmplt >::invert(), MakeSquareDerivVector(), MakeSquareVector(), and n_poly_coeffs_.
Referenced by SolveFactory().
◆ MakeSquareDerivVector()
| std::vector< double > interpolation::SolveFactory::MakeSquareDerivVector | ( | std::vector< double > | position, |
| std::vector< int > | derivIndices | ||
| ) |
Convert a position vector to a derivative of a set of polynomial products
- Parameters
-
position a position vector \( x_{b} \) derivIndices indexes the derivative, \(\vec{q} \)
Return value is a set of derivatives of polynomial products \( p_j!/(p_j-q_j)! x_{b_j}^{p_j-q_j} \)
Definition at line 94 of file SolveFactory.cpp.
References square_points_.
Referenced by BuildHInvMatrix().
◆ MakeSquareVector()
| std::vector< double > interpolation::SolveFactory::MakeSquareVector | ( | std::vector< double > | position | ) |
Convert a position vector to a set of polynomial products
- Parameters
-
position a position vector \( x_{b} \)
Return value is a set of polynomial products \( x_{b}^{p} \)
Definition at line 84 of file SolveFactory.cpp.
References square_points_.
Referenced by BuildHInvMatrix().
◆ PolynomialSolve()
| SquarePolynomialVector * interpolation::SolveFactory::PolynomialSolve | ( | const std::vector< std::vector< double > > & | values, |
| const std::vector< std::vector< double > > & | deriv_values | ||
| ) |
Solve to get a SquarePolynomialVector
- Parameters
-
values Set of y values for the solve, giving function values at the positions defined in the constructor deriv_values Set of y derivatives for the solve, giving q^th derivatives, q defined by deriv_indices, at positions defined by deriv_positions (in constructor)
Definition at line 125 of file SolveFactory.cpp.
References h_inv_, n_poly_coeffs_, interpolation::SquarePolynomialVector::SetCoefficients(), and square_temp_.
Referenced by interpolation::PPSolveFactory::solve().

Member Data Documentation
◆ h_inv_
|
private |
Definition at line 123 of file SolveFactory.h.
Referenced by BuildHInvMatrix(), and PolynomialSolve().
◆ n_poly_coeffs_
|
private |
Definition at line 118 of file SolveFactory.h.
Referenced by BuildHInvMatrix(), PolynomialSolve(), and SolveFactory().
◆ square_deriv_nearby_points_
|
private |
Definition at line 120 of file SolveFactory.h.
◆ square_points_
|
private |
Definition at line 119 of file SolveFactory.h.
Referenced by MakeSquareDerivVector(), MakeSquareVector(), and SolveFactory().
◆ square_temp_
|
private |
Definition at line 122 of file SolveFactory.h.
Referenced by PolynomialSolve(), and SolveFactory().
The documentation for this class was generated from the following files:
- /Users/gsell/src/OPAL/src/src/Classic/Fields/Interpolation/SolveFactory.h
- /Users/gsell/src/OPAL/src/src/Classic/Fields/Interpolation/SolveFactory.cpp