The Optimization Pilot (Master): Coordinates requests by optimizer to workers and reports results back on a given communicator. More...
#include <Pilot.h>


Public Member Functions | |
| Pilot (CmdArguments_t args, boost::shared_ptr< Comm_t > comm, const DVarContainer_t &dvar) | |
| Pilot (CmdArguments_t args, boost::shared_ptr< Comm_t > comm, functionDictionary_t known_expr_funcs) | |
| Pilot (CmdArguments_t args, boost::shared_ptr< Comm_t > comm, functionDictionary_t known_expr_funcs, const DVarContainer_t &dvar, const Expressions::Named_t &obj, const Expressions::Named_t &cons, std::vector< double > hypervolRef={}, bool isOptimizerRun=true) | |
| virtual | ~Pilot () |
Protected Types | |
| typedef MasterNode< typename Opt_t::SolutionState_t, SolPropagationGraph_t > | MasterNode_t |
| typedef std::map< size_t, std::pair< Param_t, reqVarContainer_t > > | Jobs_t |
| keep track of requests and running jobs More... | |
| typedef Jobs_t::iterator | JobIter_t |
Protected Member Functions | |
| void | parseInputFile (functionDictionary_t known_expr_funcs, bool isOptimizationRun) |
| virtual void | startOptimizer () |
| virtual void | startWorker () |
| virtual void | startPilot () |
| virtual void | setupPoll () |
| executed before starting polling loop More... | |
| virtual void | prePoll () |
| executed before checking for new request More... | |
| virtual void | onStop () |
| enable implementation to react to STOP tag More... | |
| virtual void | postPoll () |
| executed after handling (if any) new request More... | |
| virtual void | sendNewJobToWorker (int worker) |
| virtual bool | onMessage (MPI_Status status, size_t recv_value) |
| bool | stop (bool isOpt=true) |
| void | run () |
| Poller (MPI_Comm comm, double delay=0.1) | |
| virtual | ~Poller () |
Protected Attributes | |
| MPI_Comm | worker_comm_ |
| MPI communicator used for messages to/from worker. More... | |
| MPI_Comm | opt_comm_ |
| MPI communicator used for messages to/from optimizer. More... | |
| MPI_Comm | coworker_comm_ |
| MPI communicator used for messages between all pilots. More... | |
| boost::shared_ptr< Comm_t > | comm_ |
| CmdArguments_t | cmd_args_ |
| int | global_rank_ |
| int | my_rank_in_worker_comm_ |
| int | my_rank_in_opt_comm_ |
| int | num_coworkers_ |
| boost::scoped_ptr< MasterNode_t > | master_node_ |
| std::string | input_file_ |
| input file for simulation with embedded optimization problem More... | |
| int | total_available_workers_ |
| bool | has_opt_converged_ |
| bool | continue_polling_ |
| Expressions::Named_t | objectives_ |
| objectives More... | |
| Expressions::Named_t | constraints_ |
| constraints More... | |
| DVarContainer_t | dvars_ |
| design variables More... | |
| std::vector< double > | hypervolRef_ |
| hypervolume reference point More... | |
| std::vector< bool > | is_worker_idle_ |
| Jobs_t | running_job_list_ |
| Jobs_t | request_queue_ |
| boost::scoped_ptr< Trace > | job_trace_ |
 Protected Attributes inherited from Poller Protected Attributes inherited from Poller | |
| MPI_Comm | comm_m |
| communicator the poller listens to requests More... | |
| bool | is_running_ |
| double | last_polled_ |
| time of last MPI_Test More... | |
| double | poll_delay_ |
| delay in seconds between polls More... | |
Private Member Functions | |
| void | setup (functionDictionary_t known_expr_funcs) |
Detailed Description
template<class Opt_t, class Sim_t, class SolPropagationGraph_t, class Comm_t>
class Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >
The Optimization Pilot (Master): Coordinates requests by optimizer to workers and reports results back on a given communicator.
Every worker thread notifies the master here if idle or not. When available the master dispatches one of the pending simulations to the worker who will run the specified simulation and report results back to the master. The Optimizer class will poll the scheduler to check if some (or all) results are available and continue to optimize and request new simulation results.
- Template Parameters
-
Opt_t type of the optimizer Sim_t type of the simulation SolPropagationGraph_t strategy to distribute solution between master islands Comm_t comm splitter strategy
Member Typedef Documentation
|
protected |
|
protected |
Constructor & Destructor Documentation
|
inline |
|
inline |
Definition at line 101 of file Pilot.h.
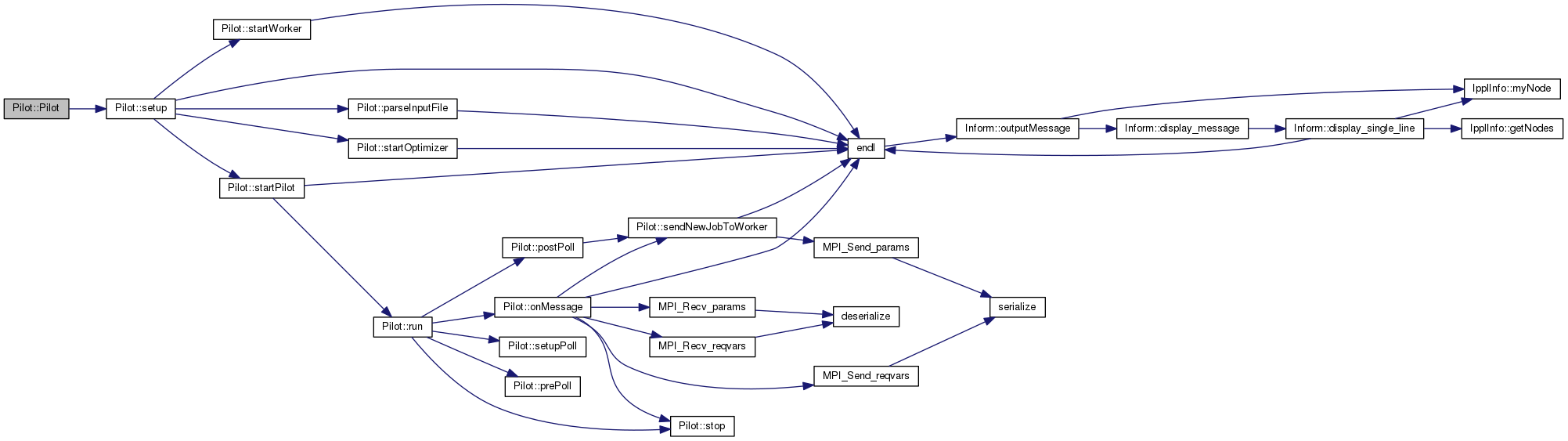
References Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::setup().
|
inline |
|
inlinevirtual |
Definition at line 129 of file Pilot.h.
References Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::constraints_, and Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::objectives_.
Member Function Documentation
|
inlineprotectedvirtual |
User specific behavior on receiving a message.
- Returns
- boolean indicating if Irecv has to be re-posted
Implements Poller.
Reimplemented in SamplePilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >.
Definition at line 419 of file Pilot.h.
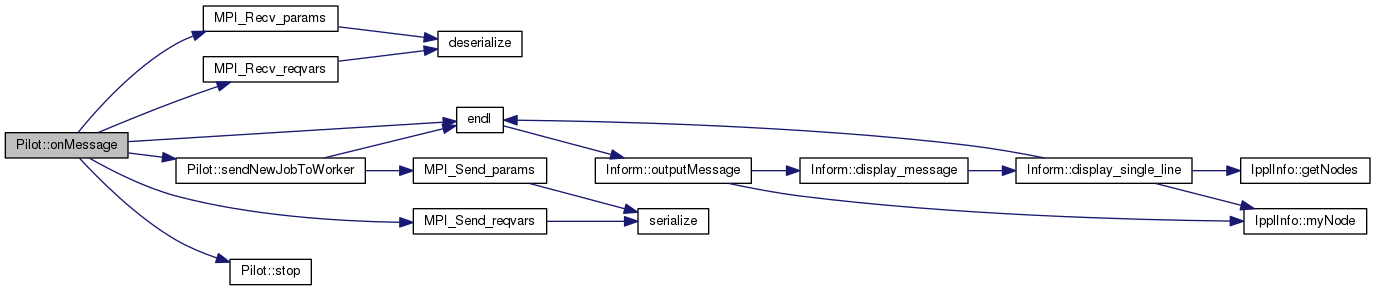
References Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::comm_, endl(), EXCHANGE_SOL_STATE_TAG, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::has_opt_converged_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::is_worker_idle_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::job_trace_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::master_node_, MPI_EXCHANGE_SOL_STATE_DATA_TAG, MPI_EXCHANGE_SOL_STATE_RES_SIZE_TAG, MPI_EXCHANGE_SOL_STATE_RES_TAG, MPI_OPT_JOB_FINISHED_TAG, MPI_Recv_params(), MPI_Recv_reqvars(), MPI_Send_reqvars(), MPI_WORKER_FINISHED_ACK_TAG, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::num_coworkers_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::opt_comm_, OPT_CONVERGED_TAG, OPT_NEW_JOB_TAG, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::request_queue_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::running_job_list_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::sendNewJobToWorker(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::stop(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::worker_comm_, WORKER_FINISHED_TAG, and WORKER_STATUSUPDATE_TAG.
Referenced by Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::run().
|
inlineprotectedvirtual |
|
inlineprotected |
Definition at line 219 of file Pilot.h.
References Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::cmd_args_, Poller::comm_m, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::constraints_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::dvars_, Physics::e, endl(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::global_rank_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::input_file_, and Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::objectives_.
Referenced by SamplePilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::setup(), and Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::setup().

|
inlineprotectedvirtual |
executed after handling (if any) new request
Implements Poller.
Reimplemented in SamplePilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >.
Definition at line 358 of file Pilot.h.
References Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::continue_polling_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::has_opt_converged_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::is_worker_idle_, MPI_STOP_TAG, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::my_rank_in_worker_comm_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::request_queue_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::sendNewJobToWorker(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::total_available_workers_, and Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::worker_comm_.
Referenced by Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::run().

|
inlineprotectedvirtual |
executed before checking for new request
Implements Poller.
Definition at line 350 of file Pilot.h.
Referenced by Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::run().
|
inlineprotectedvirtual |
The poll loop stops when receiving a 'MPI_STOP_TAG' otherwise passes message to user.
Reimplemented from Poller.
Definition at line 587 of file Pilot.h.
References Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::cmd_args_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::continue_polling_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::coworker_comm_, MPI_STOP_TAG, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::onMessage(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::opt_comm_, OPT_CONVERGED_TAG, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::postPoll(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::prePoll(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::setupPoll(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::stop(), and Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::worker_comm_.
Referenced by Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startPilot().

|
inlineprotectedvirtual |
Reimplemented in SamplePilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >.
Definition at line 390 of file Pilot.h.
References endl(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::has_opt_converged_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::is_worker_idle_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::job_trace_, MPI_Send_params(), MPI_WORK_JOBID_TAG, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::request_queue_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::running_job_list_, and Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::worker_comm_.
Referenced by Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::onMessage(), and Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::postPoll().

|
inlineprivate |
Definition at line 188 of file Pilot.h.
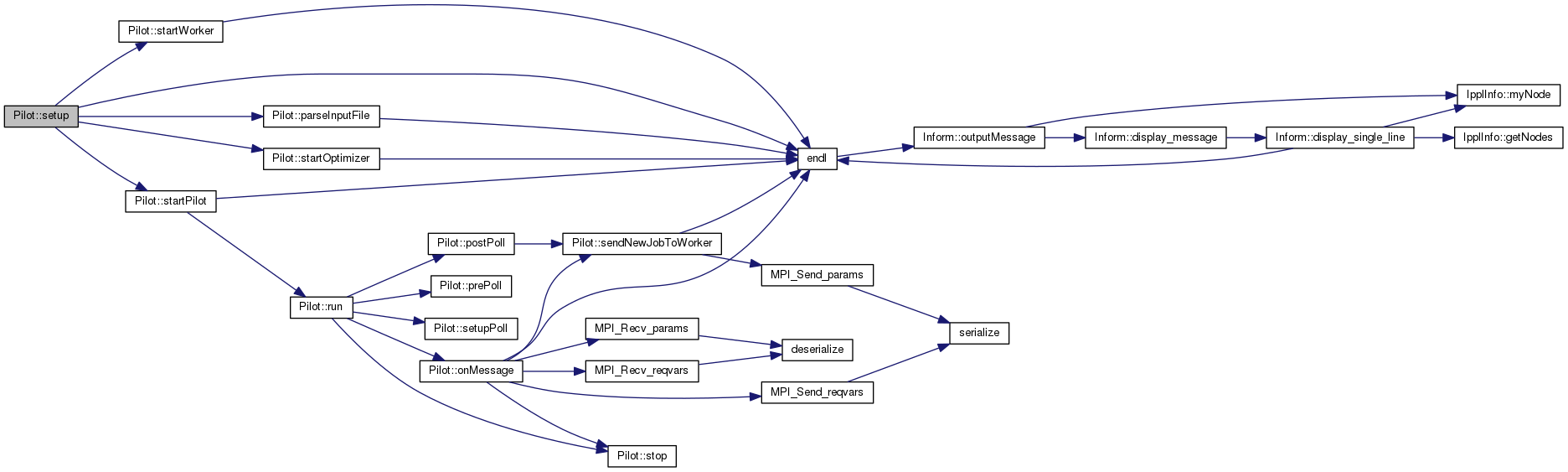
References Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::comm_, endl(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::global_rank_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::parseInputFile(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startOptimizer(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startPilot(), and Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startWorker().
Referenced by Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::Pilot().
|
inlineprotectedvirtual |
executed before starting polling loop
Implements Poller.
Definition at line 346 of file Pilot.h.
Referenced by Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::run().
|
inlineprotectedvirtual |
Definition at line 254 of file Pilot.h.
References Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::cmd_args_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::comm_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::constraints_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::dvars_, endl(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::global_rank_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::hypervolRef_, and Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::objectives_.
Referenced by Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::setup().

|
inlineprotectedvirtual |
Definition at line 292 of file Pilot.h.
References Physics::alpha, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::cmd_args_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::comm_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::constraints_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::continue_polling_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::coworker_comm_, endl(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::global_rank_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::has_opt_converged_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::is_worker_idle_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::job_trace_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::master_node_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::my_rank_in_opt_comm_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::my_rank_in_worker_comm_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::num_coworkers_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::objectives_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::opt_comm_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::run(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::total_available_workers_, and Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::worker_comm_.
Referenced by SamplePilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::setup(), and Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::setup().

|
inlineprotectedvirtual |
Definition at line 270 of file Pilot.h.
References Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::cmd_args_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::comm_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::constraints_, endl(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::global_rank_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::input_file_, and Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::objectives_.
Referenced by SamplePilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::setup(), and Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::setup().

|
inlineprotected |
Definition at line 554 of file Pilot.h.
References Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::cmd_args_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::comm_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::coworker_comm_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::has_opt_converged_, MPI_STOP_TAG, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::num_coworkers_, Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::opt_comm_, OPT_CONVERGED_TAG, and Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::request_queue_.
Referenced by SamplePilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::onMessage(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::onMessage(), and Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::run().
Member Data Documentation
|
protected |
Definition at line 149 of file Pilot.h.
Referenced by Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::parseInputFile(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::run(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startOptimizer(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startPilot(), SamplePilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startSampler(), SamplePilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startWorker(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startWorker(), and Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::stop().
|
protected |
Definition at line 148 of file Pilot.h.
Referenced by SamplePilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::onMessage(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::onMessage(), SamplePilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::setup(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::setup(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startOptimizer(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startPilot(), SamplePilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startSampler(), SamplePilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startWorker(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startWorker(), and Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::stop().
|
protected |
constraints
Definition at line 169 of file Pilot.h.
Referenced by Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::parseInputFile(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startOptimizer(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startPilot(), SamplePilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startWorker(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startWorker(), and Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::~Pilot().
|
protected |
Definition at line 166 of file Pilot.h.
Referenced by SamplePilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::postPoll(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::postPoll(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::run(), and Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startPilot().
|
protected |
MPI communicator used for messages between all pilots.
Definition at line 146 of file Pilot.h.
Referenced by Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::run(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startPilot(), and Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::stop().
|
protected |
design variables
Definition at line 170 of file Pilot.h.
Referenced by Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::parseInputFile(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startOptimizer(), and SamplePilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startSampler().
|
protected |
Definition at line 151 of file Pilot.h.
Referenced by Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::parseInputFile(), SamplePilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::setup(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::setup(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startOptimizer(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startPilot(), SamplePilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startSampler(), SamplePilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startWorker(), and Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startWorker().
|
protected |
Definition at line 165 of file Pilot.h.
Referenced by SamplePilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::onMessage(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::onMessage(), SamplePilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::postPoll(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::postPoll(), SamplePilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::sendNewJobToWorker(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::sendNewJobToWorker(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startPilot(), and Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::stop().
|
protected |
hypervolume reference point
Definition at line 171 of file Pilot.h.
Referenced by Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startOptimizer().
|
protected |
input file for simulation with embedded optimization problem
Definition at line 162 of file Pilot.h.
Referenced by Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::parseInputFile(), SamplePilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startWorker(), and Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startWorker().
|
protected |
Definition at line 175 of file Pilot.h.
Referenced by SamplePilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::onMessage(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::onMessage(), SamplePilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::postPoll(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::postPoll(), SamplePilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::sendNewJobToWorker(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::sendNewJobToWorker(), and Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startPilot().
|
protected |
Definition at line 185 of file Pilot.h.
Referenced by SamplePilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::onMessage(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::onMessage(), SamplePilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::sendNewJobToWorker(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::sendNewJobToWorker(), and Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startPilot().
|
protected |
Definition at line 159 of file Pilot.h.
Referenced by Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::onMessage(), and Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startPilot().
|
protected |
Definition at line 153 of file Pilot.h.
Referenced by Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startPilot().
|
protected |
Definition at line 152 of file Pilot.h.
Referenced by SamplePilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::postPoll(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::postPoll(), and Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startPilot().
|
protected |
Definition at line 155 of file Pilot.h.
Referenced by Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::onMessage(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startPilot(), and Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::stop().
|
protected |
objectives
Definition at line 168 of file Pilot.h.
Referenced by Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::parseInputFile(), SamplePilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::sampleMethods_m(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startOptimizer(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startPilot(), SamplePilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startSampler(), SamplePilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startWorker(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startWorker(), and Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::~Pilot().
|
protected |
MPI communicator used for messages to/from optimizer.
Definition at line 144 of file Pilot.h.
Referenced by SamplePilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::onMessage(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::onMessage(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::run(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startPilot(), and Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::stop().
|
protected |
Definition at line 182 of file Pilot.h.
Referenced by Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::onMessage(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::postPoll(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::sendNewJobToWorker(), and Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::stop().
|
protected |
Definition at line 181 of file Pilot.h.
Referenced by Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::onMessage(), and Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::sendNewJobToWorker().
|
protected |
Definition at line 164 of file Pilot.h.
Referenced by SamplePilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::postPoll(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::postPoll(), and Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startPilot().
|
protected |
MPI communicator used for messages to/from worker.
Definition at line 142 of file Pilot.h.
Referenced by Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::onMessage(), SamplePilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::postPoll(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::postPoll(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::run(), SamplePilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::sendNewJobToWorker(), Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::sendNewJobToWorker(), and Pilot< Opt_t, Sim_t, SolPropagationGraph_t, Comm_t >::startPilot().
The documentation for this class was generated from the following file:
- optimizer/Pilot/Pilot.h
